


Гарантія
Швидка доставка
Монтаж та наладка
Техпідтримка
Новинки
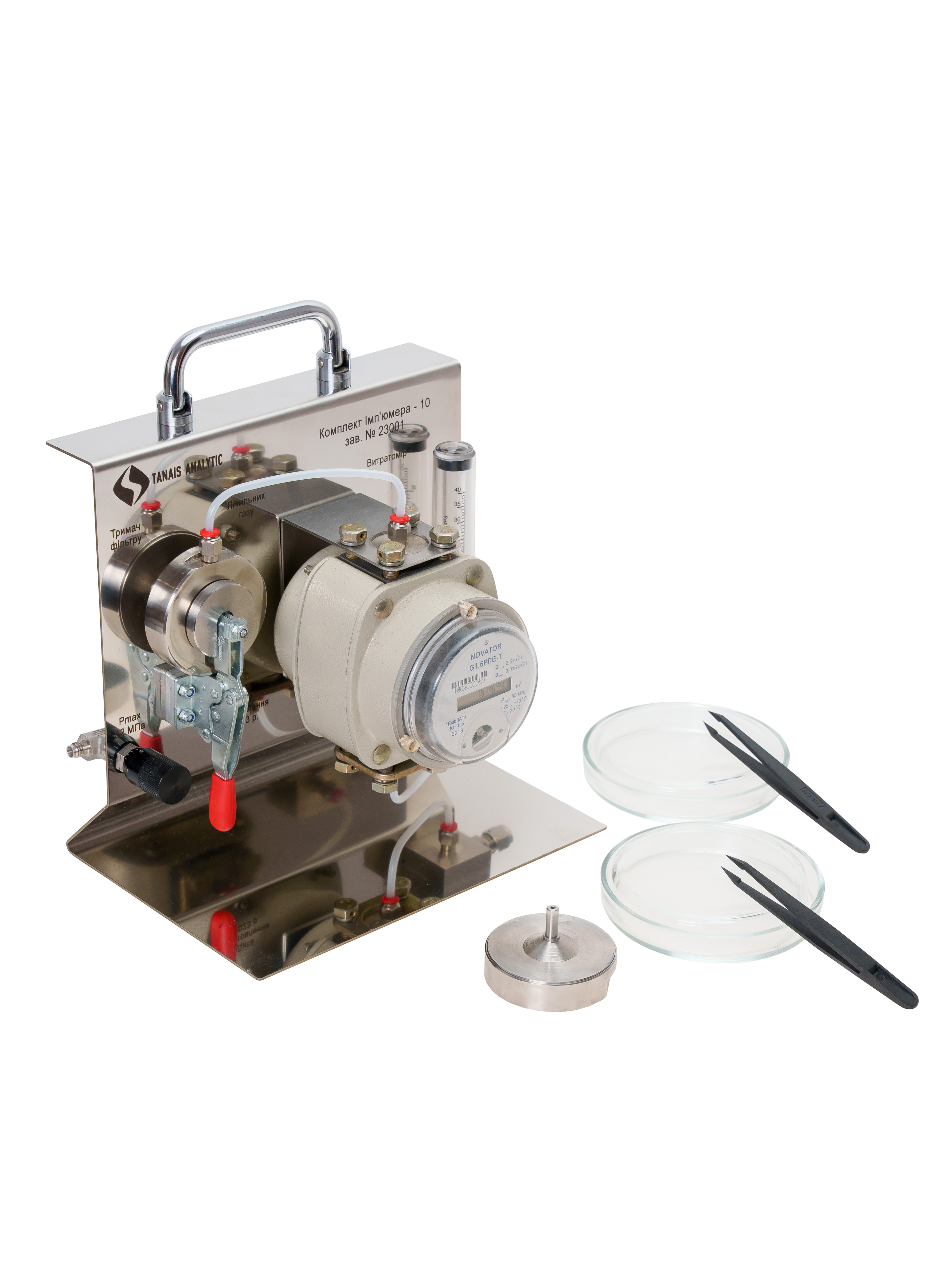
ІМП’ЮМЕРА-10. Комплект для визначення концентрації механічних домішок у природному газі

Універсальний частотний перетворювач OPDEPLUS

Прилад для вимірювання обводнення сирої нафти та емульсїі OWC50/51

Датчик диференційного тиску XMD 0,075%

Датчик тиску для стволів свердловин HU 300

Датчик тиску XMPi

Прецизійний датчик тиску x|act i

Датчик тиску ДМП 331i / ДМП 333i (+ RS 485)

Датчик диференційного тиску ДМД 331

Датчик диференційного тиску ДПС+
Всі новини
Всі статті
BD SENSORS - Надійне вимірювання тиску та рівня
ВИМІРЮВАЧІ ТЕМПЕРАТУРИ ТОЧКИ РОСИ ФОГ-4Г